यूसीएलए ने स्प्लिटर का खुलासा किया, अंतरिक्ष अन्वेषण के लिए एक टेडर जंपिंग रोबोट | Infinium-tech
टेथर्ड जंपिंग के माध्यम से ग्रहों की खोज में सक्षम एक नई रोबोटिक प्रणाली को रोबोटिक्स एंड मैकेनिज्म लेबोरेटरी (रोमेला) में कैलिफोर्निया विश्वविद्यालय, लॉस एंजिल्स (यूसीएलए) में शोधकर्ताओं द्वारा विकसित किया गया है। रोबोट, जिसका नाम स्प्लिटर (स्पेस एंड प्लैनेटरी लिम्बेड इंटेलिजेंट टीथर टेक्नोलॉजी एक्सप्लोरेशन रोबोट) है, को एक मॉड्यूलर, मल्टी-रोबोट सिस्टम के रूप में डिज़ाइन किया गया है, जो एक टीथर द्वारा जुड़े दो चौगुनी रोबोट से बना है। IEEE एयरोस्पेस कॉन्फ्रेंस (AEROCONF) 2025 में प्रस्तुत किए जाने वाले सिस्टम को चंद्रमा और क्षुद्रग्रहों जैसे कम-गुरुत्वाकर्षण वातावरण को नेविगेट करने के लिए डिज़ाइन किया गया है। रिपोर्टों से संकेत मिलता है कि रोबोटिक प्रणाली वैज्ञानिक डेटा एकत्र करते समय क्रमिक कूद कर सकती है, जो पारंपरिक ग्रह रोवर्स और ड्रोन का विकल्प प्रदान करती है।
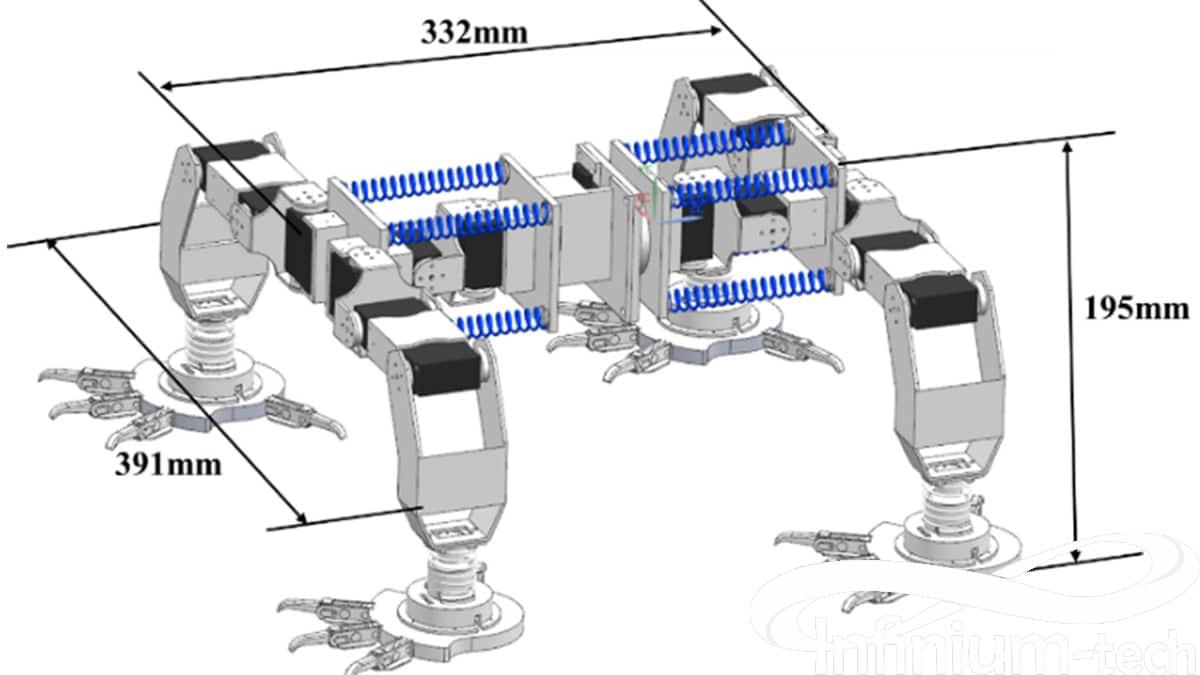
स्प्लिटर का डिजाइन और क्षमताएं
के अनुसार अध्ययन Arxiv Preprint सर्वर पर प्रकाशित, स्प्लिटर में एक टीथर द्वारा जुड़े दो हेमी-स्प्लिटर रोबोट होते हैं, जो एक डम्बल जैसी संरचना बनाते हैं। टीथर मध्य-वायु यात्रा के दौरान गतिशीलता और स्थिरता को सक्षम करता है, जिससे गैस थ्रस्टर्स या प्रतिक्रिया पहियों जैसे अतिरिक्त दृष्टिकोण नियंत्रण तंत्र की आवश्यकता को समाप्त करता है। सिस्टम को अंग की स्थिति और टीथर की लंबाई को समायोजित करके अपनी जड़ता को गतिशील रूप से बदलने के लिए डिज़ाइन किया गया है, जिससे उड़ान के दौरान स्थिरता सुनिश्चित होती है। स्प्लिटर का विकास पारंपरिक ग्रह रोवर्स की सीमाओं से प्रेरित था, जो अक्सर धीमे और बोझिल होते हैं, और चंद्रमा और क्षुद्रग्रहों जैसे आकाशीय शरीर पर वायुमंडलीय स्थितियों की अनुपस्थिति के कारण ड्रोन की अव्यवहारिकता।
स्प्लिटर की गति के पीछे तंत्र
रिपोर्टों से पता चलता है कि स्प्लिटर मध्य-वायु आंदोलनों के दौरान अपने अभिविन्यास को विनियमित करने के लिए एक मॉडल प्रेडिक्टिव कंट्रोलर (एमपीसी) के आधार पर एक जड़त्वीय मॉर्फिंग तंत्र को शामिल करता है। यह अवधारणा टेनिस रैकेट प्रमेय पर आधारित है, जिसे Dzhanibekov प्रभाव के रूप में भी जाना जाता है, जो बताता है कि कैसे असममित जड़ता वाली वस्तुएं सहज घूर्णी फ़्लिप से गुजरती हैं। युसुके तनाका, अध्ययन के प्रमुख लेखक, बताया Tech Xplore कि तकनीक नियंत्रित जड़ता समायोजन के माध्यम से रोबोट की मध्य-हवा की उड़ान के आक्रामक स्थिरीकरण की अनुमति देती है। यह सुझाव दिया गया है कि यह विधि बाहरी बल तंत्र पर भरोसा किए बिना स्थिरता सुनिश्चित करके ग्रहों की खोज की दक्षता को महत्वपूर्ण रूप से बढ़ाती है।
संभावित अनुप्रयोग और भविष्य के अनुसंधान
अनुसंधान टीम ने संकेत दिया है कि स्प्लिटर को ग्रहों की खोज मिशनों में रोबोट के झुंड के रूप में तैनात किया जा सकता है, जिससे व्यापक और असंरचित इलाके को कुशलता से पता चला। टीथर तंत्र भी एक इकाई को क्रेटर या गुफाओं का पता लगाने में सक्षम कर सकता है, जबकि दूसरा लंगर डाला जाता है, समर्थन प्रदान करता है। रोमेला के निदेशक और परियोजना के प्रमुख अन्वेषक डेनिस होंग ने टेक Xplore को बताया कि चल रहे शोध हार्डवेयर में सुधार करने पर ध्यान केंद्रित कर रहे हैं, जिसमें नए एक्ट्यूएटर्स और सेंसिंग तंत्र शामिल हैं। भविष्य के अध्ययन से अपेक्षा की जाती है कि वे उच्च-निष्ठा सिमुलेशन के माध्यम से जड़त्वीय मॉर्फिंग तंत्र को और अधिक मान्य करने की उम्मीद कर रहे हैं, वास्तविक दुनिया के अंतरिक्ष अनुप्रयोगों के लिए स्प्लिटर की क्षमताओं को बढ़ाने के दीर्घकालिक लक्ष्य के साथ।
नवीनतम तकनीकी समाचारों और समीक्षाओं के लिए, गैजेट्स 360 पर पालन करें एक्स, फेसबुक, WhatsApp, धागे और Google समाचार। गैजेट्स और टेक पर नवीनतम वीडियो के लिए, हमारी सदस्यता लें YouTube चैनल। यदि आप शीर्ष प्रभावकों के बारे में सब कुछ जानना चाहते हैं, तो हमारे इन-हाउस का अनुसरण करें कौन है पर Instagram और YouTube।

2024 में ग्लोबल रॉकेट लॉन्च ने 2024 में रिकॉर्ड उच्च स्तर की शुरुआत की, 2025 में अधिक वृद्धि की उम्मीद है
मई 2024 सौर तूफान असामान्य विकिरण बेल्ट को ट्रिगर करता है, अंतरिक्ष सुरक्षा चिंताओं को बढ़ाता है











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Leave a Reply